Installing Marlin (PlatformIO)
Before reading this article, you should have already read Installing Marlin and downloaded the Marlin source code. If you haven’t done these steps yet, go read that article, then follow the link back to this page to continue the process.
PlatformIO
For the best build experience download Visual Studio Code and install the PlatformIO IDE extension. PlatformIO can also be installed as a stand alone CLI, which may be the best choice if you want to control the build process from a script on a server.
Auto Build Marlin
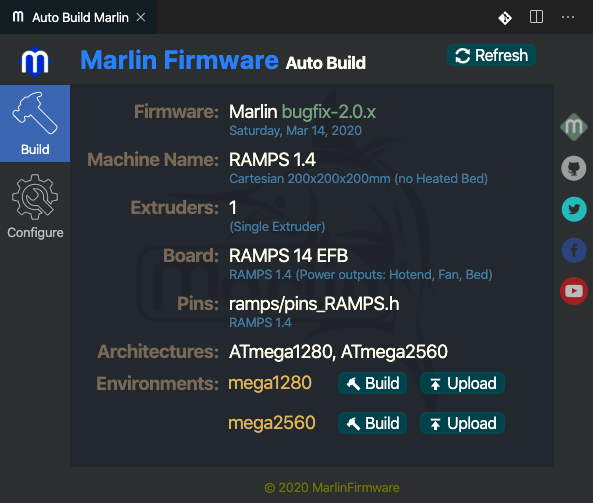
The (Auto Build Marlin) extension provides a simplified interface to build and upload Marlin so that you don’t ever need to know the name of the build environment for your board. See the Auto Build Marlin page for more details.